|
Yinong He Hi there! I am a first-year Master of Science in Robotics (MSR) student at Robotics Institute, Carnegie Mellon University. I am fortunate to be co-advised by Prof. Zackory Erickson and Prof. David Held. Prior to joining CMU, I spent a summer as a research intern at the startup Noematrix, advised by Prof. Cewu Lu. I studied Data Science Engineering at University of Michigan and pursued a dual major in Electrical and Computer Engineering at Shanghai Jiao Tong University. I am grateful to have worked under the guidance of Prof. Joyce Chai and Prof. Dmitry Berenson. My research focuses on robotic manipulation, with an emphasis on dexterous hands and objects with complex dynamics such as deformable materials. I am interested in combining learning and control to enable robots to interact with the world with agility and adaptability, with a particular focus on rapid adaptation and generalization in manipulation. |

|
Research(* indicates equal contribuion) |
|
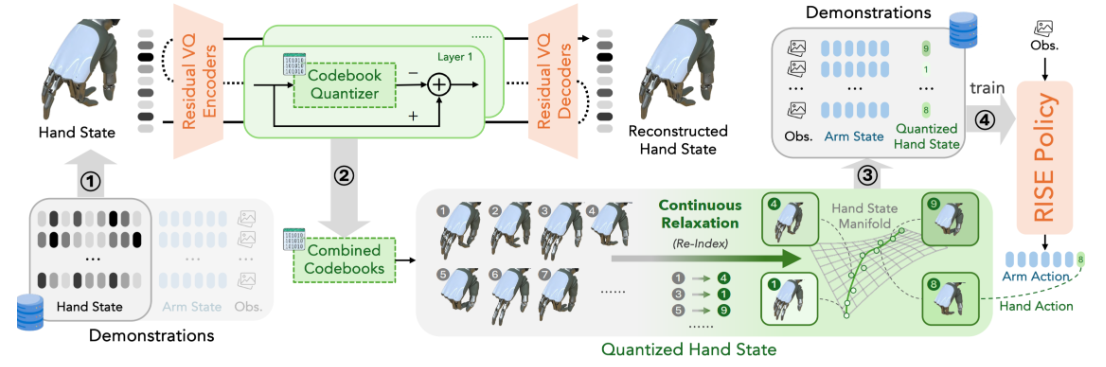
Ying Feng*, Hongjie Fang*, Yinong He*, Jingjing Chen, Chenxi Wang, Zihao He, Ruonan Liu, Cewu Lu Accepted at ICRA 2026 Webside / Paper
|
|
Zixuan Huang, Yinong He*, Yating Lin*, Dmitry Berenson Accepted at ICRA 2025 Webside / Paper
|

|
Jiajun Xi*, Yinong He*, Jianing Yang, Yinpei Dai, Joyce Chai Accepted at EMNLP 2024 Main Conference Code / Paper
|
|
Website Page adapted from source code. |